BBC Microbit
![]()


BBC micro:bit
Bitkit - Introduction
Introduction
The Bitkit micro:car is a robot car kit for the micro:bit based on the grove zero connection system.
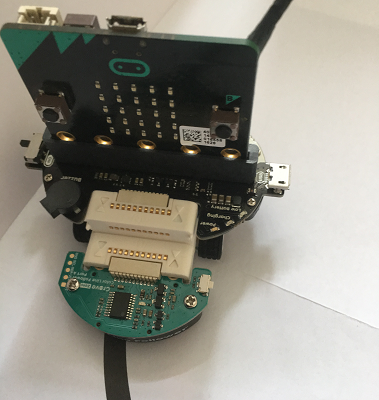
The micro:car is appropriately named. It is a tiny car, about as small as could be made with a micro:bit. There are 3 parts that connect together using the grove zero magnetic connectors. They are the edge connector, tracked chassis and the line and colour sensing module. It has a rechargeable battery.
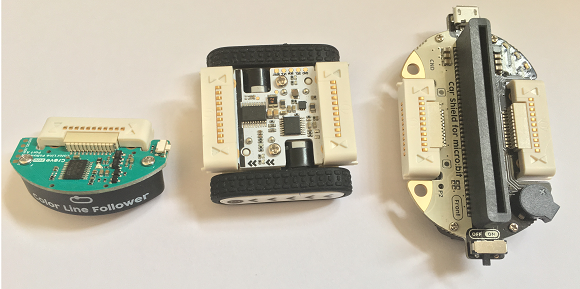
On edge connector, you have a buzzer, an on/off switch, some indicator LEDs and, on the underside, there are 4 Neopixels. There are a few unused grove zero connection points where compatible components could be connected although these are not currently on sale separately. There are some crocodile clip holes for pin 2 and GND which, I supposed, could be used to connect something.

There are 5 line sensors which are read over i2c. When using the sensor, you get a decent amount of control over the car's position relative to a line. The colour sensor is also read over i2c. You can read the colour sensor in two ways. You can read a number indicating whether it senses black, red, green, blue or some other colour. The first four colours are the colours of marker pens provided with the kit. You can also get an RGB value corresponding to a colour being sensed.
The car is very slow. You won't be racing this all over the place as you can with some other cars. If you want speed, go for a 4tronix robo:bit where you are putting 6V into some decent size motors. Also, you aren't getting much scope for customising. If you want to do that, you are better off with a self-build vehicle around a motor driver.
The rechargeable battery is one of the advantages of this vehicle but is only 200mah, so won't keep you driving for too long. The size of the vehicle is quite useful for driving it around on top of a table, even a small one. The other interesting thing about the car is the colour sensor. You get some 'tracks' in the kit to colour in. You can get the car to react to reading different colours. This means that you can make some complex line and colour following tracks for the car to move about on autonomously.
This section of the site records some of my early goes on the car. I rewrote the stock code that you can find online to make it more useful for the way I wanted to use the car. You should be able to adapt it for your own purposes and do a lot more with the car than I have shown on this site.